Autem vel eum iriure dolor in hendrerit in vulputate velit esse molestie consequat, vel illum dolore eu feugiat nulla facilisis at vero eros et dolore feugait.
xiaobao@armbian:~/software/shareprint$ hp-setup -i
HP Linux Imaging and Printing System (ver. 3.23.12)
Printer/Fax Setup Utility ver. 9.0
Copyright (c) 2001-18 HP Development Company, LP
This software comes with ABSOLUTELY NO WARRANTY.
This is free software, and you are welcome to distribute it
under certain conditions. See COPYING file for more details.
(Note: Defaults for each question are maked with a '*'. Press <enter> to accept the default.)
--------------------------------
| SELECT CONNECTION (I/O) TYPE |
--------------------------------
Num Connection Description
Type
-------- ---------- ----------------------------------------------------------
0* usb Universal Serial Bus (USB)
1 net Network/Ethernet/Wireless (direct connection or JetDirect)
Enter number 0...1 for connection type (q=quit, enter=usb*) ? 0
Using connection type: usb
Setting up device: hp:/usb/DeskJet_1110_series?serial=CN75J28090069Z
---------------------
| PRINT QUEUE SETUP |
---------------------
Please enter a name for this print queue (m=use model name:'DeskJet_1110'*, q=quit) ?
Using queue name: DeskJet_1110
Locating PPD file... Please wait.
Found PPD file: hplip:0/ppd/hplip/HP/hp-deskjet_1110_series.ppd
Description:
Note: The model number may vary slightly from the actual model number on the device.
Does this PPD file appear to be the correct one (y=yes*, n=no, q=quit) ?
Enter a location description for this printer (q=quit) ?
Enter additonal information or notes for this printer (q=quit) ?
Adding print queue to CUPS:
Device URI: hp:/usb/DeskJet_1110_series?serial=CN75J28090069Z
Queue name: DeskJet_1110
PPD file: hplip:0/ppd/hplip/HP/hp-deskjet_1110_series.ppd
Location:
Information:
You do not have permission to add a printer. You need authentication.
Username: root
Password:
---------------------
| PRINTER TEST PAGE |
---------------------
Would you like to print a test page (y=yes*, n=no, q=quit) ? y
HP Linux Imaging and Printing System (ver. 3.23.12)
Testpage Print Utility ver. 6.0
Copyright (c) 2001-18 HP Development Company, LP
This software comes with ABSOLUTELY NO WARRANTY.
This is free software, and you are welcome to distribute it
under certain conditions. See COPYING file for more details.
HP Linux Imaging and Printing System (ver. 3.23.12)
System Tray Status Service ver. 2.0
Copyright (c) 2001-18 HP Development Company, LP
This software comes with ABSOLUTELY NO WARRANTY.
This is free software, and you are welcome to distribute it
under certain conditions. See COPYING file for more details.
warning: No display found.
error: hp-systray requires Qt4 GUI and DBus support. Exiting.
warning: Unable to connect to dbus. Is hp-systray running?
Printing test page to printer DeskJet_1110...
请求 ID 为 DeskJet_1110-1 (1 个文件)
Test page has been sent to printer.
note: If an error occured, or the test page failed to print, refer to the HPLIP website
note: at: http://hplip.sourceforge.net for troubleshooting and support.
Done.
Done.
sudo: error in /etc/sudo.conf, line 0 while loading plugin ‘sudoers_policy’ sudo: /usr/lib/sudo/sudoers.so must only be writable by owner sudo: fatal error, unable to load plugins
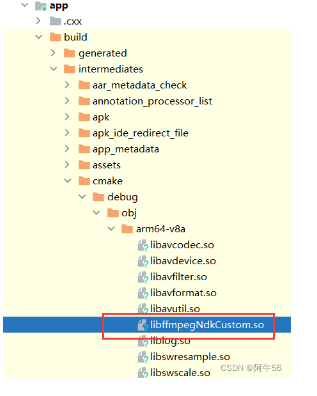
问题描述 安装app demo报错;app安装不上 Installation did not succeed. The application could not be installed: INSTALL_FAILED_INSUFFICIENT_STORAGE The device needs more free storage to install the application (extra space is needed in addition to APK size).
① 在同一层的电源走线以辐射状走线,并最小化线的长度总和; ②走电源、地线时,相互靠近;在关键信号线边上布一条地线,这条地线应尽量靠近信号线。这样就形成了较小的回路面积,减小差模辐射对外界干扰的敏感度。当信号线的旁边加一条地线后,就形成了一个面积最小的回路,信号电流肯定会取道这个回路,而不是其它地线路径。 ③ 如果是双层线路板,可以在线路板的另一面,紧靠近信号线的下面,沿着信号线布一条地线,地线尽量宽些。这样形成的回路面积等于线路板的厚度乘以信号线的长度。
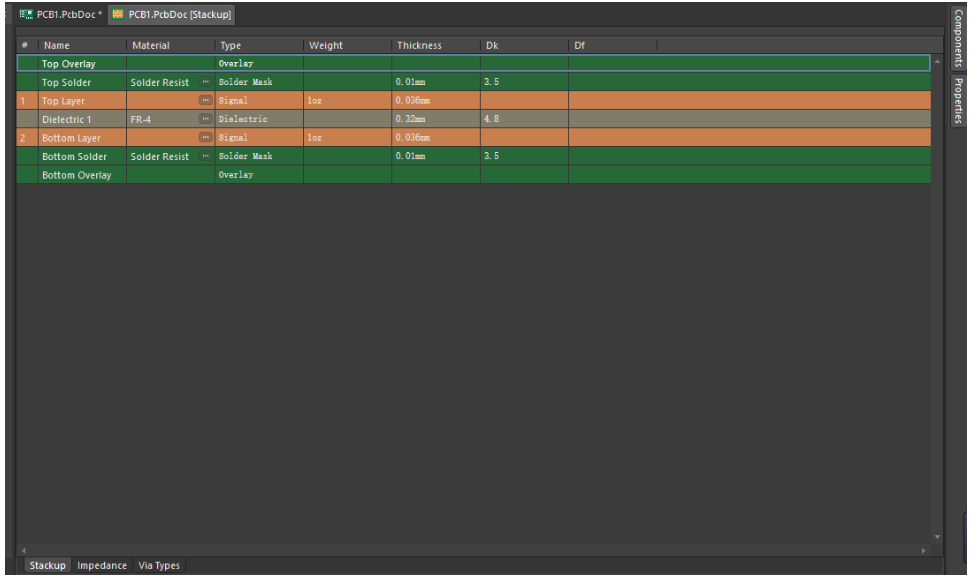
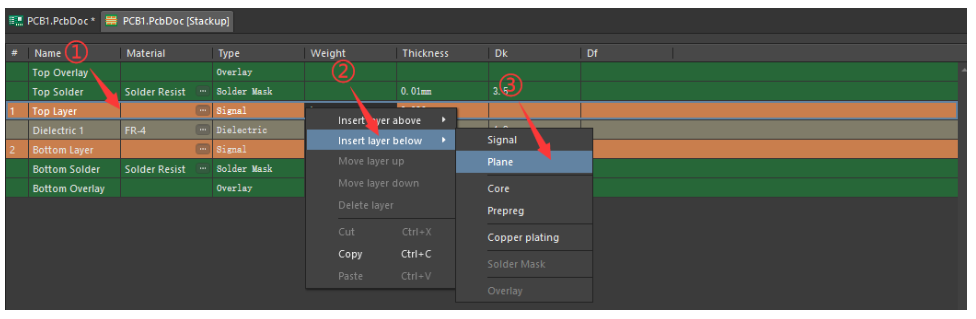
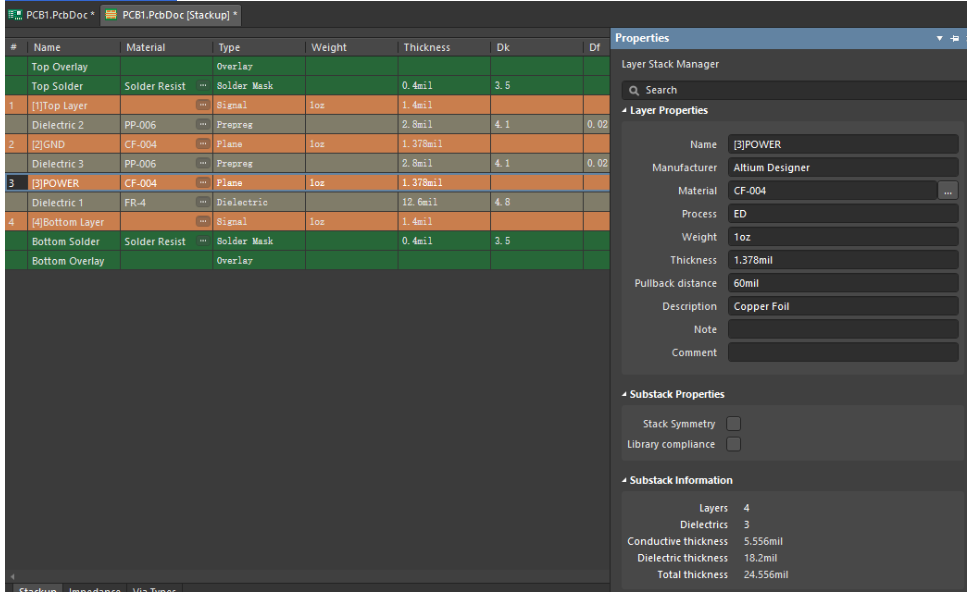
步骤4:设置GND层和POWER层的内缩值,GND层内缩20mil,POWER层内缩60mil; GND层内缩设置: ① 选择GND层 → ② 单击Panels → ③ 选择Properties → ④ 取消勾选Stack Symmetry → ⑤ 设置Pullback distance值为20mil。
同理,POWER层内缩:
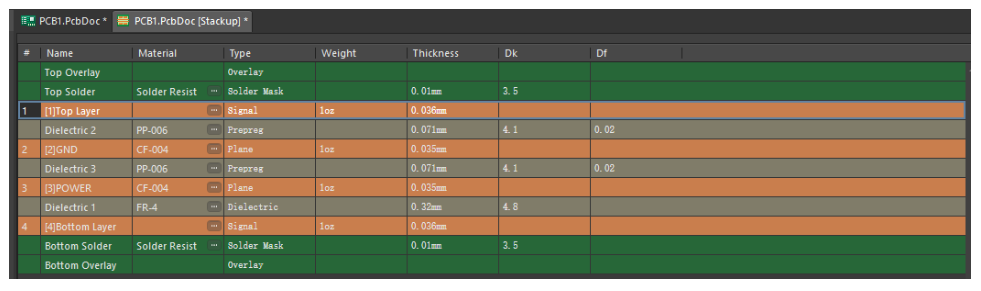
步骤5:四层板布线 ① 与两层板布线方式相同,在Top层和Bottom层布线,而GND层和POWER层禁止布线,需要连接对应的地和电源网络; ② 层与层之间的连接是通过过孔/焊盘实现的,多层板同样如此。放置元器件的Top Layer或Bottom Layer先把电源和GND(或其他的走线)通过过孔引出; ③ 通过过孔/焊盘引出的电源和地网络,在Top和Bottom不需要走线,此处不需要走线的电源和地,指的是POWER层网络和GND层网络连接的电源和地。