1.系统信息
命令
arch
显示机器的处理器架构(1)
uname -m
显示机器的处理器架构(2)
uname -r
显示正在使用的内核版本
dmidecode -q
显示硬件系统部件 – (SMBIOS / DMI)
hdparm -i /dev/hda
罗列一个磁盘的架构特性
hdparm -tT /dev/sda
在磁盘上执行测试性读取操作
cat /proc/cpuinfo
显示CPU info的信息
cat /proc/interrupts
显示中断
cat /proc/meminfo
校验内存使用
cat /proc/swaps
显示哪些swap被使用
cat /proc/version
显示内核的版本
cat /proc/net/dev
显示网络适配器及统计
cat /proc/mounts
显示已加载的文件系统
lspci -tv
罗列 PCI 设备
lsusb -tv
显示 USB 设备
date
显示系统日期
cal 2007
显示2007年的日历表
date 041217002007.00
设置日期和时间 – 月日时分年.秒
clock -w
将时间修改保存到 BIOS
2.关机 (系统的关机、重启以及登出 )
命令
shutdown -h now
关闭系统(1)
init 0
关闭系统(2)
telinit 0
关闭系统(3)
shutdown -h hours:minutes &
按预定时间关闭系统
shutdown -c
取消按预定时间关闭系统
shutdown -r now
重启(1)
reboot
重启(2)
logout
注销
3.文件和目录
命令
cd /home
进入 ‘/ home’ 目录’
cd ..
返回上一级目录
cd ../..
返回上两级目录
cd
进入个人的主目录
cd ~user1
进入个人的主目录
cd –
返回上次所在的目录
pwd
显示工作路径
ls
查看目录中的文件
ls -F
查看目录中的文件
ls -l
显示文件和目录的详细资料
ls -a
显示隐藏文件
ls [0-9]
显示包含数字的文件名和目录名
tree
显示文件和目录由根目录开始的树形结构(1)
lstree
显示文件和目录由根目录开始的树形结构(2)
mkdir dir1
创建一个叫做 ‘dir1′ 的目录’
mkdir dir1 dir2
同时创建两个目录
mkdir -p /tmp/dir1/dir2
创建一个目录树
rm -f file1
删除一个叫做 ‘file1’ 的文件
rmdir dir1
删除一个叫做 ‘dir1′ 的目录’
rm -rf dir1
删除一个叫做 ‘dir1’ 的目录并同时删除其内容
rm -rf dir1 dir2
同时删除两个目录及它们的内容
mv dir1 new_dir
重命名/移动 一个目录
cp file1 file2
复制一个文件
cp dir/* .
复制一个目录下的所有文件到当前工作目录
cp -a /tmp/dir1 .
复制一个目录到当前工作目录
cp -a dir1 dir2
复制一个目录
ln -s file1 lnk1
创建一个指向文件或目录的软链接
ln file1 lnk1
创建一个指向文件或目录的物理链接
touch -t 0712250000 file1
修改一个文件或目录的时间戳 – (YYMMDDhhmm)
iconv -l
列出已知的编码
4.文件搜索
命令
find / -name file1
从 ‘/’ 开始进入根文件系统搜索文件和目录
find / -user user1
搜索属于用户 ‘user1’ 的文件和目录
find /home/user1 -name \*.bin
在目录 ‘/ home/user1′ 中搜索带有’.bin’ 结尾的文件
find /usr/bin -type f -atime +100
搜索在过去100天内未被使用过的执行文件
find /usr/bin -type f -mtime -10
搜索在10天内被创建或者修改过的文件
find / -name \*.rpm -exec chmod 755 ‘{}’ \;
搜索以 ‘.rpm’ 结尾的文件并定义其权限
find / -xdev -name *.rpm
搜索以 ‘.rpm’ 结尾的文件,忽略光驱、捷盘等可移动设备
locate *.ps
寻找以 ‘.ps’ 结尾的文件 – 先运行 ‘updatedb’ 命令
whereis halt
显示一个二进制文件、源码或man的位置
which halt
显示一个二进制文件或可执行文件的完整路径
5.挂载一个文件系统
命令
mount /dev/hda2 /mnt/hda2
挂载一个叫做hda2的盘 – 确定目录 ‘/ mnt/hda2’ 已经存在
umount /dev/hda2
卸载一个叫做hda2的盘 – 先从挂载点 ‘/ mnt/hda2’ 退出
fuser -km /mnt/hda2
当设备繁忙时强制卸载
umount -n /mnt/hda2
运行卸载操作而不写入 /etc/mtab 文件- 当文件为只读或当磁盘写满时非常有用
mount /dev/fd0 /mnt/floppy
挂载一个软盘
mount /dev/cdrom /mnt/cdrom
挂载一个cdrom或dvdrom
mount /dev/hdc /mnt/cdrecorder
挂载一个cdrw或dvdrom
mount /dev/hdb /mnt/cdrecorder
挂载一个cdrw或dvdrom
mount -o loop file.iso /mnt/cdrom
挂载一个文件或ISO镜像文件
mount -t vfat /dev/hda5 /mnt/hda5
挂载一个Windows FAT32文件系统
mount /dev/sda1 /mnt/usbdisk
挂载一个usb 捷盘或闪存设备
mount -t smbfs -o username=user,password=pass //WinClient/share /mnt/share
挂载一个windows网络共享
6.磁盘空间
命令
df -h
显示已经挂载的分区列表
ls -lSr |more
以尺寸大小排列文件和目录
du -sh dir1
估算目录 ‘dir1′ 已经使用的磁盘空间’
du -sk * | sort -rn
以容量大小为依据依次显示文件和目录的大小
rpm -q -a –qf ‘%10{SIZE}t%{NAME}n’
sort -k1,1n
dpkg-query -W -f=’installed-size;10t{Package}n’
sort -k1,1n
7.用户和群组
命令
groupadd group_name
创建一个新用户组
groupdel group_name
删除一个用户组
groupmod -n new_group_name old_group_name
重命名一个用户组
useradd -c “Name Surname ” -g admin -d /home/user1 -s /bin/bash user1
创建一个属于 “admin” 用户组的用户
useradd user1
创建一个新用户
userdel -r user1
删除一个用户 ( ‘-r’ 排除主目录)
usermod -c “User FTP” -g system -d /ftp/user1 -s /bin/nologin user1
修改用户属性
passwd
修改口令
passwd user1
修改一个用户的口令 (只允许root执行)
chage -E 2005-12-31 user1
设置用户口令的失效期限
pwck
检查 ‘/etc/passwd’ 的文件格式和语法修正以及存在的用户
grpck
检查 ‘/etc/passwd’ 的文件格式和语法修正以及存在的群组
newgrp group_name
登陆进一个新的群组以改变新创建文件的预设群组
9.文件的权限 – 使用 “+” 设置权限,使用 “-” 用于取消
命令
ls -lh
显示权限
ls /tmp | pr -T5 -W$COLUMNS
将终端划分成5栏显示
chmod ugo+rwx directory1
设置目录的所有人(u)、群组(g)以及其他人(o)以读(r )、写(w)和执行(x)的权限
chmod go-rwx directory1
删除群组(g)与其他人(o)对目录的读写执行权限
chown user1 file1
改变一个文件的所有人属性
chown -R user1 directory1
改变一个目录的所有人属性并同时改变改目录下所有文件的属性
chgrp group1 file1
改变文件的群组
chown user1:group1 file1
改变一个文件的所有人和群组属性
find / -perm -u+s
罗列一个系统中所有使用了SUID控制的文件
chmod u+s /bin/file1
设置一个二进制文件的 SUID 位 – 运行该文件的用户也被赋予和所有者同样的权限
chmod u-s /bin/file1
禁用一个二进制文件的 SUID位
chmod g+s /home/public
设置一个目录的SGID 位 – 类似SUID ,不过这是针对目录的
chmod g-s /home/public
禁用一个目录的 SGID 位
chmod o+t /home/public
设置一个文件的 STIKY 位 – 只允许合法所有人删除文件
chmod o-t /home/public
禁用一个目录的 STIKY 位
10.文件的特殊属性 – 使用 “+” 设置权限,使用 “-” 用于取消
命令
chattr +a file1
只允许以追加方式读写文件
chattr +c file1
允许这个文件能被内核自动压缩/解压
chattr +d file1
在进行文件系统备份时,dump程序将忽略这个文件
chattr +i file1
设置成不可变的文件,不能被删除、修改、重命名或者链接
chattr +s file1
允许一个文件被安全地删除
chattr +S file1
一旦应用程序对这个文件执行了写操作,使系统立刻把修改的结果写到磁盘
chattr +u file1
若文件被删除,系统会允许你在以后恢复这个被删除的文件
lsattr
显示特殊的属性
11.打包和压缩文件
命令
bunzip2 file1.bz2
解压一个叫做 ‘file1.bz2’的文件
bzip2 file1
压缩一个叫做 ‘file1’ 的文件
gunzip file1.gz
解压一个叫做 ‘file1.gz’的文件
gzip file1
压缩一个叫做 ‘file1’的文件
gzip -9 file1
最大程度压缩
rar a file1.rar test_file
创建一个叫做 ‘file1.rar’ 的包
rar a file1.rar file1 file2 dir1
同时压缩 ‘file1’, ‘file2’ 以及目录 ‘dir1’
rar x file1.rar
解压rar包
unrar x file1.rar
解压rar包
tar -cvf archive.tar file1
创建一个非压缩的 tarball
tar -cvf archive.tar file1 file2 dir1
创建一个包含了 ‘file1’, ‘file2’ 以及 ‘dir1’的档案文件
tar -tf archive.tar
显示一个包中的内容
tar -xvf archive.tar
释放一个包
tar -xvf archive.tar -C /tmp
将压缩包释放到 /tmp目录下
tar -cvfj archive.tar.bz2 dir1
创建一个bzip2格式的压缩包
tar -xvfj archive.tar.bz2
解压一个bzip2格式的压缩包
tar -cvfz archive.tar.gz dir1
创建一个gzip格式的压缩包
tar -xvfz archive.tar.gz
解压一个gzip格式的压缩包
zip file1.zip file1
创建一个zip格式的压缩包
zip -r file1.zip file1 file2 dir1
将几个文件和目录同时压缩成一个zip格式的压缩包
unzip file1.zip
解压一个zip格式压缩包
12.RPM 包 – (Fedora, Redhat及类似系统)
命令
rpm -ivh package.rpm
安装一个rpm包
rpm -ivh –nodeeps package.rpm
安装一个rpm包而忽略依赖关系警告
rpm -U package.rpm
更新一个rpm包但不改变其配置文件
rpm -F package.rpm
更新一个确定已经安装的rpm包
rpm -e package_name.rpm
删除一个rpm包
rpm -qa
显示系统中所有已经安装的rpm包
rpm -qa
grep httpd
rpm -qi package_name
获取一个已安装包的特殊信息
rpm -qg “System Environment/Daemons”
显示一个组件的rpm包
rpm -ql package_name
显示一个已经安装的rpm包提供的文件列表
rpm -qc package_name
显示一个已经安装的rpm包提供的配置文件列表
rpm -q package_name –whatrequires
显示与一个rpm包存在依赖关系的列表
rpm -q package_name –whatprovides
显示一个rpm包所占的体积
rpm -q package_name –scripts
显示在安装/删除期间所执行的脚本l
rpm -q package_name –changelog
显示一个rpm包的修改历史
rpm -qf /etc/httpd/conf/httpd.conf
确认所给的文件由哪个rpm包所提供
rpm -qp package.rpm -l
显示由一个尚未安装的rpm包提供的文件列表
rpm –import /media/cdrom/RPM-GPG-KEY
导入公钥数字证书
rpm –checksig package.rpm
确认一个rpm包的完整性
rpm -qa gpg-pubkey
确认已安装的所有rpm包的完整性
rpm -V package_name
检查文件尺寸、 许可、类型、所有者、群组、MD5检查以及最后修改时间
rpm -Va
检查系统中所有已安装的rpm包- 小心使用
rpm -Vp package.rpm
确认一个rpm包还未安装
rpm2cpio package.rpm
cpio –extract –make-directories bin
rpm -ivh /usr/src/redhat/RPMS/arch/package.rpm
从一个rpm源码安装一个构建好的包
rpmbuild –rebuild package_name.src.rpm
从一个rpm源码构建一个 rpm 包
13.YUM 软件包升级器 – (Fedora, RedHat及类似系统)
命令
yum install package_name
下载并安装一个rpm包
yum localinstall package_name.rpm
将安装一个rpm包,使用你自己的软件仓库为你解决所有依赖关系
yum update package_name.rpm
更新当前系统中所有安装的rpm包
yum update package_name
更新一个rpm包
yum remove package_name
删除一个rpm包
yum list
列出当前系统中安装的所有包
yum search package_name
在rpm仓库中搜寻软件包
yum clean packages
清理rpm缓存删除下载的包
yum clean headers
删除所有头文件
yum clean all
删除所有缓存的包和头文件
14.DEB 包 (Debian, Ubuntu 以及类似系统)
命令
dpkg -i package.deb
安装/更新一个 deb 包
dpkg -r package_name
从系统删除一个 deb 包
dpkg -l
显示系统中所有已经安装的 deb 包
dpkg -l
grep httpd
dpkg -s package_name
获得已经安装在系统中一个特殊包的信息
dpkg -L package_name
显示系统中已经安装的一个deb包所提供的文件列表
dpkg –contents package.deb
显示尚未安装的一个包所提供的文件列表
dpkg -S /bin/ping
确认所给的文件由哪个deb包提供
15.APT 软件工具 (Debian, Ubuntu 以及类似系统)
命令
apt-get install package_name
安装/更新一个 deb 包
apt-cdrom install package_name
从光盘安装/更新一个 deb 包
apt-get update
升级列表中的软件包
apt-get upgrade
升级所有已安装的软件
apt-get remove package_name
从系统删除一个deb包
apt-get check
确认依赖的软件仓库正确
apt-get clean
从下载的软件包中清理缓存
apt-cache search searched-package
返回包含所要搜索字符串的软件包名称
16.查看文件内容
命令
cat file1
从第一个字节开始正向查看文件的内容
tac file1
从最后一行开始反向查看一个文件的内容
more file1
查看一个长文件的内容
less file1
类似于 ‘more’ 命令,但是它允许在文件中和正向操作一样的反向操作
head -2 file1
查看一个文件的前两行
tail -2 file1
查看一个文件的最后两行
tail -f /var/log/messages
实时查看被添加到一个文件中的内容
17.文本处理
命令
cat file1 file2 …
command <> file1_in.txt_or_file1_out.txt
cat file1
command( sed, grep, awk, grep, etc…) > result.txt
cat file1
command( sed, grep, awk, grep, etc…) >> result.txt
grep Aug /var/log/messages
在文件 ‘/var/log/messages’中查找关键词”Aug”
grep ^Aug /var/log/messages
在文件 ‘/var/log/messages’中查找以”Aug”开始的词汇
grep [0-9] /var/log/messages
选择 ‘/var/log/messages’ 文件中所有包含数字的行
grep Aug -R /var/log/*
在目录 ‘/var/log’ 及随后的目录中搜索字符串”Aug”
sed ‘s/stringa1/stringa2/g’ example.txt
将example.txt文件中的 “string1” 替换成 “string2”
sed ‘/^$/d’ example.txt
从example.txt文件中删除所有空白行
sed ‘/ *#/d; /^$/d’ example.txt
从example.txt文件中删除所有注释和空白行
echo ‘esempio’
tr ‘[:lower:]’ ‘[:upper:]’
sed -e ‘1d’ result.txt
从文件example.txt 中排除第一行
sed -n ‘/stringa1/p’
查看只包含词汇 “string1″的行
sed -e ‘s/ *$//’ example.txt
删除每一行最后的空白字符
sed -e ‘s/stringa1//g’ example.txt
从文档中只删除词汇 “string1” 并保留剩余全部
sed -n ‘1,5p;5q’ example.txt
查看从第一行到第5行内容
sed -n ‘5p;5q’ example.txt
查看第5行
sed -e ‘s/00*/0/g’ example.txt
用单个零替换多个零
cat -n file1
标示文件的行数
cat example.txt
awk ‘NR%2==1’
echo a b c
awk ‘{print $1}’
echo a b c
awk ‘{print $1,$3}’
paste file1 file2
合并两个文件或两栏的内容
paste -d ‘+’ file1 file2
合并两个文件或两栏的内容,中间用”+”区分
sort file1 file2
排序两个文件的内容
sort file1 file2 | uniq
取出两个文件的并集(重复的行只保留一份)
sort file1 file2 | uniq -u
删除交集,留下其他的行
sort file1 file2 | uniq -d
取出两个文件的交集(只留下同时存在于两个文件中的文件)
comm -1 file1 file2
比较两个文件的内容只删除 ‘file1’ 所包含的内容
comm -2 file1 file2
比较两个文件的内容只删除 ‘file2’ 所包含的内容
comm -3 file1 file2
比较两个文件的内容只删除两个文件共有的部分
18.字符设置和文件格式转换
命令
dos2unix filedos.txt fileunix.txt
将一个文本文件的格式从MSDOS转换成UNIX
unix2dos fileunix.txt filedos.txt
将一个文本文件的格式从UNIX转换成MSDOS
recode ..HTML < page.txt > page.html
将一个文本文件转换成html
recode -l | more
显示所有允许的转换格式
19.文件系统分析
命令
badblocks -v /dev/hda1
检查磁盘hda1上的坏磁块
fsck /dev/hda1
修复/检查hda1磁盘上linux文件系统的完整性
fsck.ext2 /dev/hda1
修复/检查hda1磁盘上ext2文件系统的完整性
e2fsck /dev/hda1
修复/检查hda1磁盘上ext2文件系统的完整性
e2fsck -j /dev/hda1
修复/检查hda1磁盘上ext3文件系统的完整性
fsck.ext3 /dev/hda1
修复/检查hda1磁盘上ext3文件系统的完整性
fsck.vfat /dev/hda1
修复/检查hda1磁盘上fat文件系统的完整性
fsck.msdos /dev/hda1
修复/检查hda1磁盘上dos文件系统的完整性
dosfsck /dev/hda1
修复/检查hda1磁盘上dos文件系统的完整性
20.初始化一个文件系统
命令
mkfs /dev/hda1
在hda1分区创建一个文件系统
mke2fs /dev/hda1
在hda1分区创建一个linux ext2的文件系统
mke2fs -j /dev/hda1
在hda1分区创建一个linux ext3(日志型)的文件系统
mkfs -t vfat 32 -F /dev/hda1
创建一个 FAT32 文件系统
fdformat -n /dev/fd0
格式化一个软盘
mkswap /dev/hda3
创建一个swap文件系统
21.SWAP文件系统
命令
mkswap /dev/hda3
创建一个swap文件系统
swapon /dev/hda3
启用一个新的swap文件系统
swapon /dev/hda2 /dev/hdb3
启用两个swap分区
22.备份
命令
dump -0aj -f /tmp/home0.bak /home
制作一个 ‘/home’ 目录的完整备份
dump -1aj -f /tmp/home0.bak /home
制作一个 ‘/home’ 目录的交互式备份
restore -if /tmp/home0.bak
还原一个交互式备份
rsync -rogpav –delete /home /tmp
同步两边的目录
rsync -rogpav -e ssh –delete /home ip_address:/tmp
通过SSH通道rsync
rsync -az -e ssh –delete ip_addr:/home/public /home/local
通过ssh和压缩将一个远程目录同步到本地目录
rsync -az -e ssh –delete /home/local ip_addr:/home/public
通过ssh和压缩将本地目录同步到远程目录
dd bs=1M if=/dev/hda
gzip
dd if=/dev/sda of=/tmp/file1
备份磁盘内容到一个文件
tar -Puf backup.tar /home/user
执行一次对 ‘/home/user’ 目录的交互式备份操作
( cd /tmp/local/ && tar c . )
ssh -C user@ip_addr ‘cd /home/share/ && tar x -p’
( tar c /home )
ssh -C user@ip_addr ‘cd /home/backup-home && tar x -p’
tar cf – .
(cd /tmp/backup ; tar xf – )
find /home/user1 -name ‘*.txt’
xargs cp -av –target-directory=/home/backup/ –parents
find /var/log -name ‘*.log’
tar cv –files-from=-
dd if=/dev/hda of=/dev/fd0 bs=512 count=1
做一个将 MBR (Master Boot Record)内容复制到软盘的动作
dd if=/dev/fd0 of=/dev/hda bs=512 count=1
从已经保存到软盘的备份中恢复MBR内容
23.光盘
命令
cdrecord -v gracetime=2 dev=/dev/cdrom -eject blank=fast -force
清空一个可复写的光盘内容
mkisofs /dev/cdrom > cd.iso
在磁盘上创建一个光盘的iso镜像文件
mkisofs /dev/cdrom
gzip > cd_iso.gz
mkisofs -J -allow-leading-dots -R -V “Label CD” -iso-level 4 -o ./cd.iso data_cd
创建一个目录的iso镜像文件
cdrecord -v dev=/dev/cdrom cd.iso
刻录一个ISO镜像文件
gzip -dc cd_iso.gz | cdrecord dev=/dev/cdrom –
刻录一个压缩了的ISO镜像文件
mount -o loop cd.iso /mnt/iso
挂载一个ISO镜像文件
cd-paranoia -B
从一个CD光盘转录音轨到 wav 文件中
cd-paranoia — “-3”
从一个CD光盘转录音轨到 wav 文件中(参数-3)
cdrecord –scanbus
扫描总线以识别scsi通道
dd if=/dev/hdc | md5sum
校验一个设备的md5sum编码,例如一张 CD
24.网络 – (以太网和WIFI无线)
命令
ifconfig eth0
显示一个以太网卡的配置
ifup eth0
启用一个 ‘eth0’ 网络设备
ifdown eth0
禁用一个 ‘eth0’ 网络设备
ifconfig eth0 192.168.1.1 netmask 255.255.255.0
控制IP地址
ifconfig eth0 promisc
设置 ‘eth0’ 成混杂模式以嗅探数据包 (sniffing)
dhclient eth0
以dhcp模式启用 ‘eth0’
route -n
show routing table
route add -net 0/0 gw IP_Gateway
configure default gateway
route add -net 192.168.0.0 netmask 255.255.0.0 gw 192.168.1.1
configure static route to reach network ‘192.168.0.0/16’
route del 0/0 gw IP_gateway
remove static route
echo “1” > /proc/sys/net/ipv4/ip_forward
activate ip routing
hostname
show hostname of system
host www.example.com
lookup hostname to resolve name to ip address and viceversa(1)
nslookup www.example.com
lookup hostname to resolve name to ip address and viceversa(2)
ip link show
show link status of all interfaces
mii-tool eth0
show link status of ‘eth0’
ethtool eth0
show statistics of network card ‘eth0’
netstat -tup
show all active network connections and their PID
netstat -tupl
show all network services listening on the system and their PID
tcpdump tcp port 80
show all HTTP traffic
iwlist scan
show wireless networks
iwconfig eth1
show configuration of a wireless network card
whois www.example.com
lookup on Whois database
到此这篇关于Linux 常用命令操作大全(推荐收藏)的文章就介绍到这了,更多相关Linux 常用命令操作内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
一、不同容量EEPROM区别
1、AT24C64和AT24C02容量不容页长度不一样
AT24C64D单页大小:64-Kbit (8,192 x 8)
AT24C02C单页大小:2-Kbit (256 x 8)
2、读写时序不同
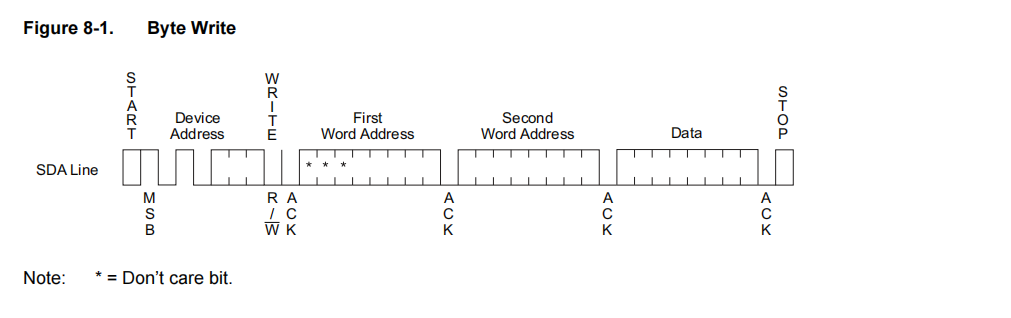
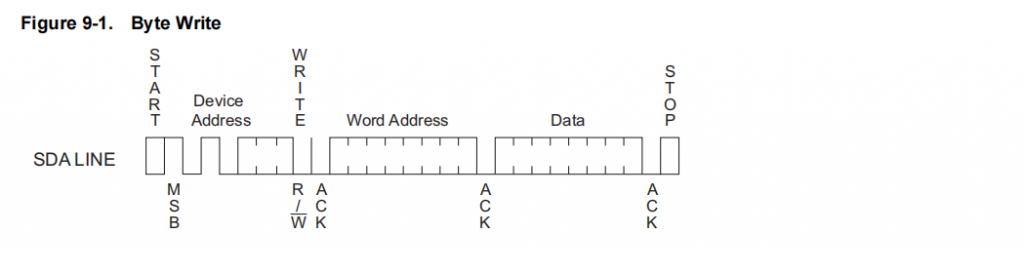
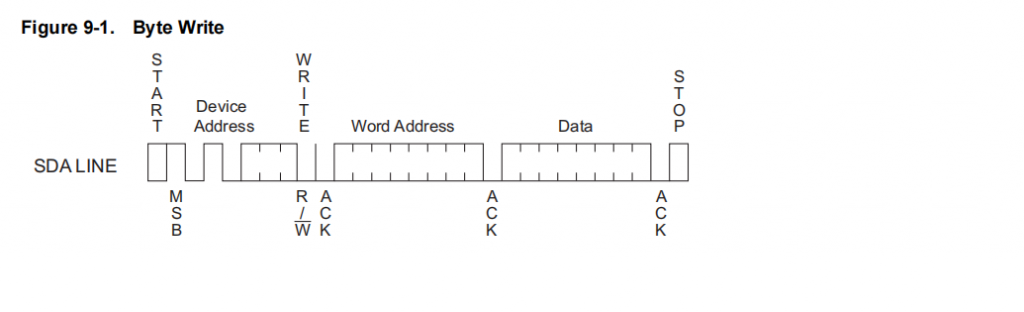
注意:由于AT24C64D比AT24C02C页数量多,并且超过一个字节长度,所以AT24C64D页地址增加一个字节。
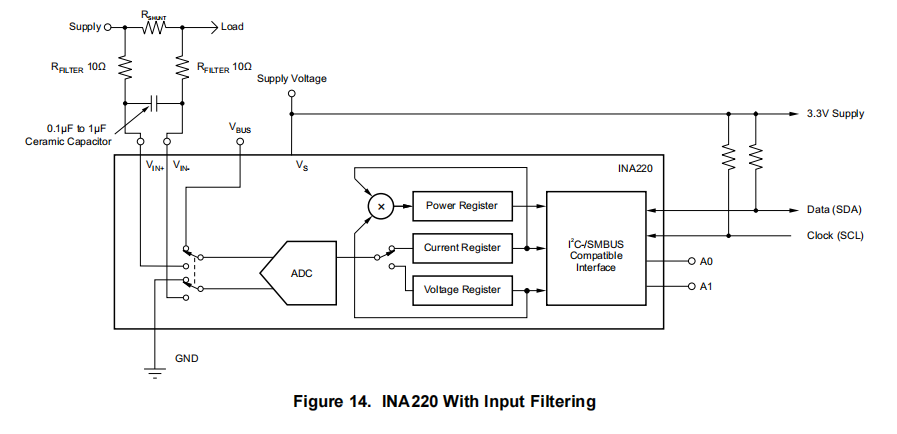
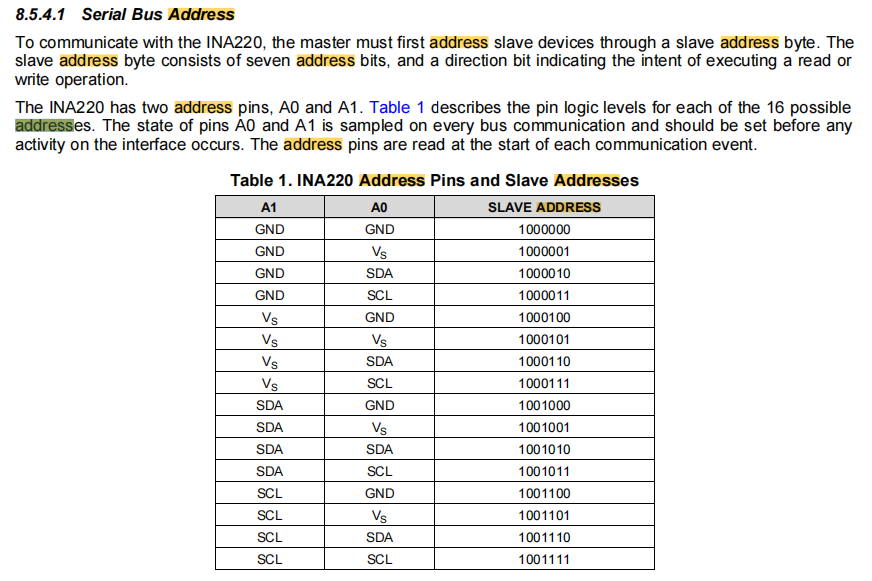
1、通讯支持I2c和SMBus接口协议,从机地址如下图所示:
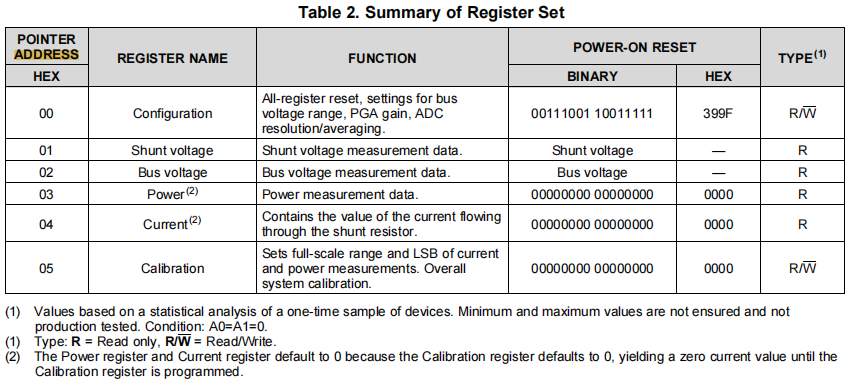
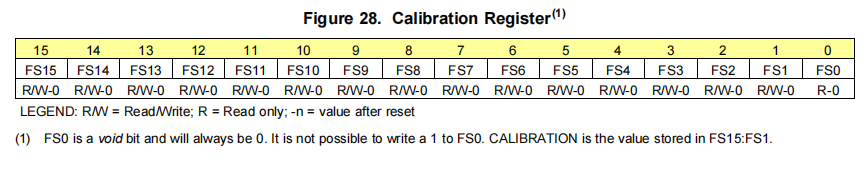
1、配置寄存器

2、并联电压寄存器(根据配置寄存器参数有相应调整)
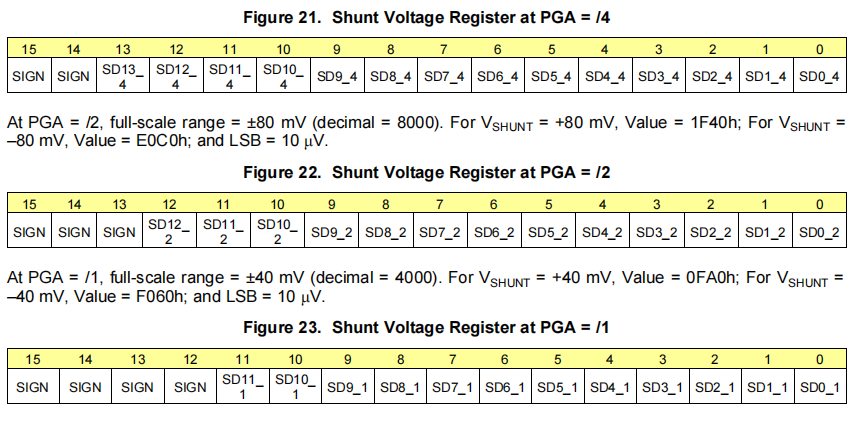
3、总电压寄存器
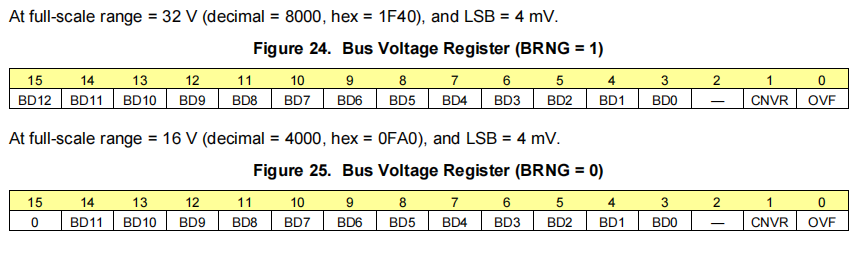
4、功率寄存器

5、电流寄存器

6、校准寄存器
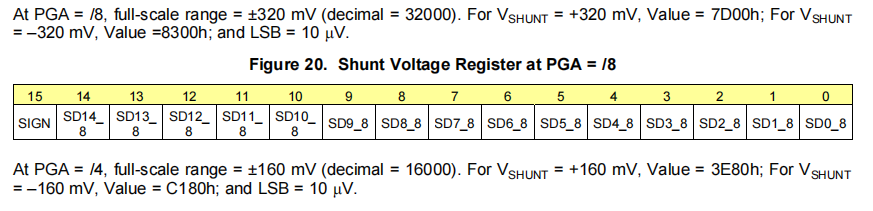
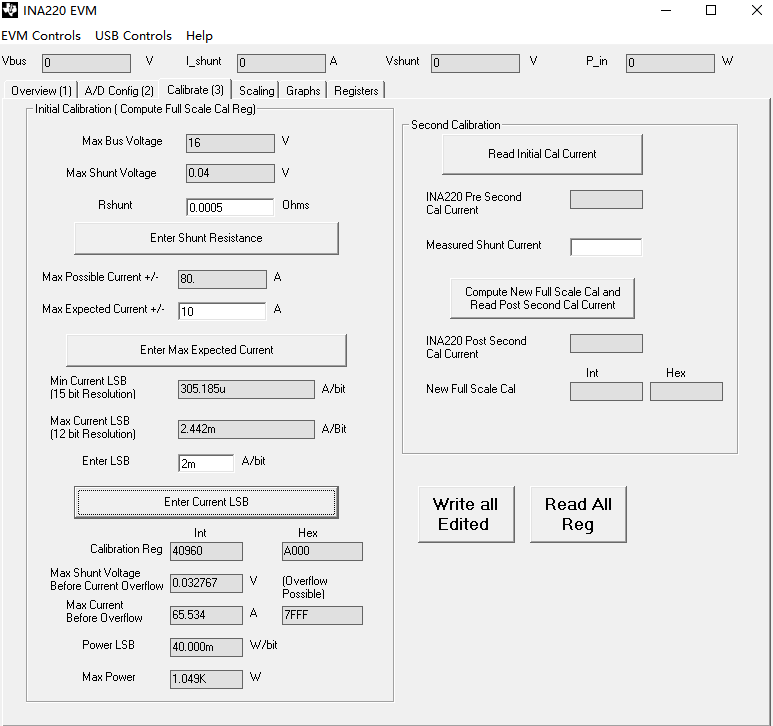
1、并联电压
ShuntVoltage/ShuntVoltage(寄存器值)=320mV/7D00H
ShuntVoltage=ShuntVoltage(寄存器值)*320mV/7D00H
ShuntVoltage(mV)=ShuntVoltage(寄存器值)/100
2、总电压
BusVoltage=(BusVoltage(寄存器值)>>3)*32V/8000
3、电流
Current=ShuntVoltage(寄存器值)*校准寄存器值*LSB(mA)/(4096*1000)
4、功率值
Power=电流寄存器*电压寄存器*0.04(W)/5000
由于NXP为LX2160增加了硬件加密引擎与openssl接口,我们可以直接编译使用openssl API接口。
1、编译:
$ cd flexbuild
$ source setup.env
Build cryptodev-linux:
$ flex-builder -c cryptodev_linux -a arm64 # automatically setup cross-toolchain and fetch
cryptodev-linux repository to build
Build OpenSSL:
$ flex-builder -c openssl -a arm64
Merge OpenSSL and cryptodev-linux components into target rootfs:
$ flex-builder -i merge-component -a arm64
Generate bootpartition tarball:
$ flex-builder -i mkbootpartition -a arm64
flex-builder -i mkbootpartition -a arm64 -m lx2160ardb_rev2 -b sd2、配置:
cat /etc/ld.so.conf
include /etc/ld.so.conf.d/*.conf
修改为:
#include /etc/ld.so.conf.d/*.conf
# libc default configuration
/usr/local/lib
# Multiarch support
/usr/local/lib/aarch64-linux-gnu
/lib/aarch64-linux-gnu
/usr/lib/aarch64-linux-gnu
/usr/lib/aarch64-linux-gnu/libfakeroot3、加载模块
user@localhost:~$ sudo modprobe cryptodev
[sudo] password for user:
user@localhost:~$ ls /dev/crypto
/dev/crypto
user@localhost:~$ openssl engine
(devcrypto) /dev/crypto engine
(dynamic) Dynamic engine loading support4、Verify the CAAM offloading
Hardware operations can be monitored with the interrupt counters for CAAM JR and QI (DPAA1 and DPAA2) interfaces.
user@localhost:~$ cat /proc/interrupts | grep jr
78: 20 0 0 0 GICv2 103 Level 1710000.jr
79: 0 0 0 0 GICv2 104 Level 1720000.jr
80: 0 0 0 0 GICv2 105 Level fsl-jr0
user@localhost:~$ openssl enc -aes-256-cfb -k secret -P -md sha1
*** WARNING : deprecated key derivation used.
Using -iter or -pbkdf2 would be better.
salt=233157F098D1B0E8
key=D2B0C0C088AA7DAA6CF37CC856E283E3B0C3DD2BE155688DE18593EB3F997776
iv =A4E2C86E0DBA1211B5A4B02EBEFF6DC4
user@localhost:~$ cat /proc/interrupts | grep jr
78: 54 0 0 0 GICv2 103 Level 1710000.jr
79: 69 0 0 0 GICv2 104 Level 1720000.jr
80: 0 0 0 0 GICv2 105 Level fsl-jr05、DPDK加解密接口测试

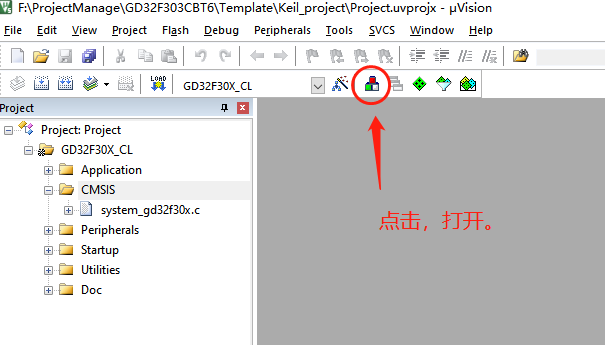
解决方式:将Project文件夹中的工程扩展名由.uvproj改为.uvprojx
问题原因:前提是所有的库安装都是正常且正确的,所以应该是如下问题:keil版本问题导致的Device导入错误,可能是使用keil4版本编写,使用keil5打开出错。
报错内容:
one or more devices family pack devices are not present
error:not found device
解决方式:安装库
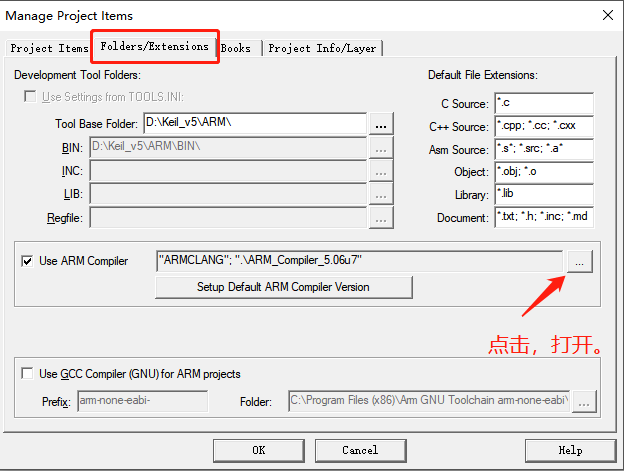
一、分析
通过字面意思可以得知目标程序需要arm版本5编译器.
二、解决
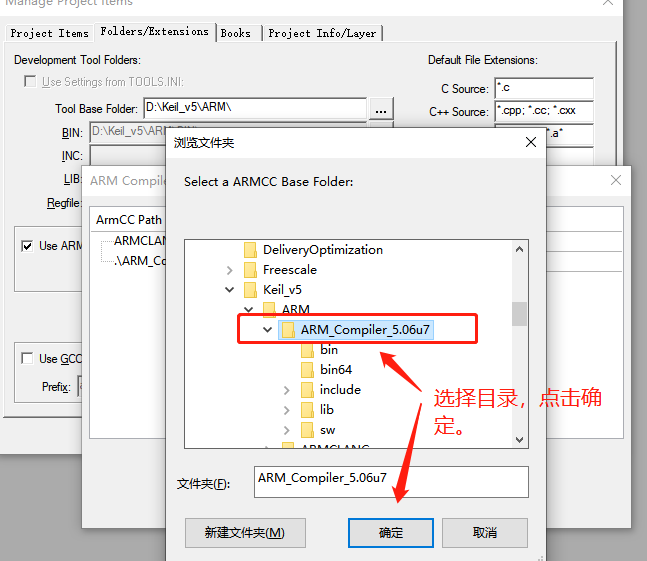
1、官网下载编译
2、安装
注意:要安装到D:\Keil_v5\ARM\ARM_Compiler_5.06u7。盘符可根据实际情况。
3、keil添加多编译器

在使用 repo sync 同步 Android 源码时,可以添加一些选项来减少同步时间和要下载的代码空间。具体的命令是 repo sync -c --no-tags --prune -j 4。
查看 repo help status 的帮助信息,对所给的各个选项具体说明如下:
git branch -r 命令看不到服务器新增的分支名。如果不加 -c 选项,那么同步的时候,会打印 [new branch] 这样的信息,使用 git branch -r 命令可查看到服务器新增的分支。--prune 选项,可以让本地仓库删除对这个分支的跟踪引用。查看 repo 的 .repo/repo/project.py 源码,这个选项实际上是作为 git fetch 命令的选项来执行。查看 man git-fetch 对自身 --prune 选项的说明如下,可供参考:-p, –prune-j 4 指定用4个线程来同步。如果没有提供该选项,默认是用2个线程。总的来说,在 repo sync -c --no-tags --prune -j 4 命令中,使用 -c 和 –no-tags 选项可以减少需要同步的内容,从而减少要占用的本地代码空间,也可以减少一些同步时间。
使用 -j 选项来指定启用多线程进行同步,可以加快执行速度,也就减少了同步时间。
使用 –prune 选项去掉已删除分支的跟踪引用,一般不会用到,这个选项可加可不加。
有时会需要扩展多个CAN接口,在CAN设备比较多的时候作分组控制。这里使用imx6q芯片,它本身已经自带了两个CAN接口,如果需再扩展4个接口,就要想想办法了。sja1000是一个经典的CAN控制器,稳定可靠,由于它在业界使用方案比较成熟,用它来扩展再好不过。imx6q作为一款性能强大的处理器,扩展sja1000这种相对慢速的芯片,着实有点屈才。可是没办法,项目需要,就像PCIE转ISA,或者USB转PCIE一样,效率并不是最重要的,硬件的兼容性和软件的易维护性同样重要。
这篇文档分硬件部分和软件部分来介绍下imx6q如何来与sja1000芯片组合应用起来,主要实现了通过imx6芯片的eim总线外扩4个sja1000 can控制器的功能。
首先来一张sja1000芯片的经典电路,是与8051单片机配合使用的。
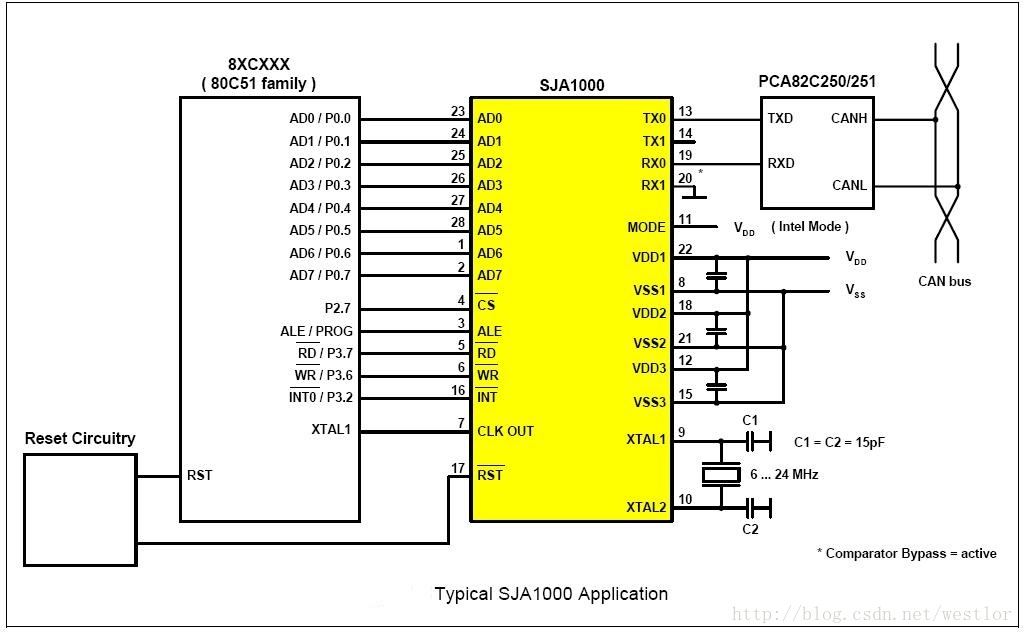
看到这张图,是不是首先就想到了8051单片机的P0脚,还记得当时刚刚接触51单片机时,还会对P0与P1/P2/P3引脚的特性不同有些困惑。P0脚是3态的,可以应用在地址/数据总线。51单片机就是通过P0接口来扩展些SRAM、ROM啥的。这个电路图中,就是一个典型的外扩SRAM的接法:P0做地址/数据总线,P2.7独立GPIO控制CS脚(CS脚为低SJA1000芯片才工作),ALE/RO/WE是读写控制信号,INT中断脚接到P3.2接口上。从而可以看出,sja1000芯片留给外部的接口就是一个SRAM接口(CPU通过总线读写sja1000芯片的寄存器来控制),只要CPU有能够扩展SRAM的总线接口,那么就能外扩sja1000芯片。那么imx6芯片有没有类似的总线呢?
答案是肯定的,imx6系列芯片功能丰富,性能爆表,区区一个SRAM总线接口,怎会没有。imx6芯片带有WEIM接口,支持16/32bit的地址/数据总线混合模式,不过地址线最高为27bit,这个接口可灵活配置地址/数据端口,支持外接SRAM、NorFalsh和OneNAND等设备,先来看一张典型的imx6芯片的EIM接口图。
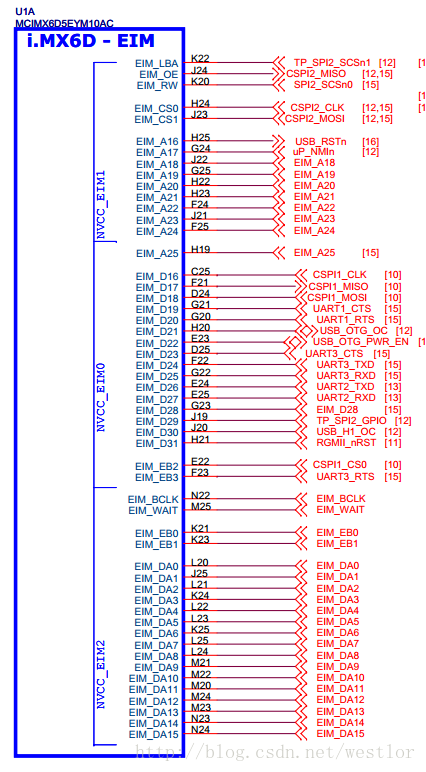
EIM总线地址总线引脚范围为EIM_DA0_15、EIM_A16_26,数据总线引脚范围为EIM_DA0_15、EIM_D16_31(图中有些引脚没有引出)。sja1000与之相连,可以是地址/数据总线复用的方式,也可以是地址总线与数据总线分离的方式(通过配置地址和数据引脚端口)。从电路简洁性上讲,当然采用复用的方式,就像51单片机的P0接口一样。有些芯片的SRAM接口并不支持地址/数据总线复用,与sja1000芯片相接时需要在电路上加逻辑器件,这个在另一篇文档中再写吧。
imx6芯片手册中指出,EIM总线只支持16/32bit的复用方式,通过EIM_CSnGCR1寄存器来配置,如下图。
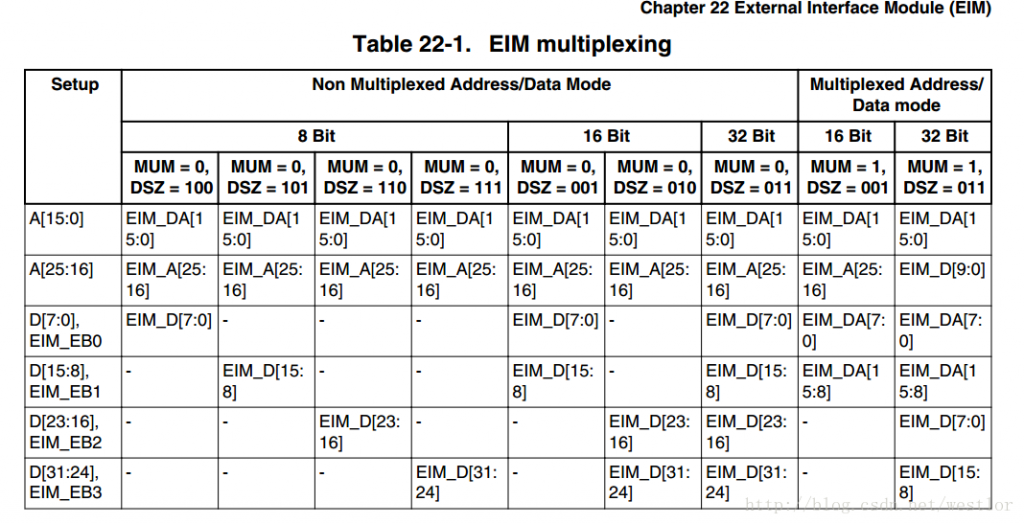
EIM总线与sja1000这种8位的SRAM接口类型芯片相连,用16bit的multiplexing模式搓搓有余。可以16位的总线来访问8位总线存储器时,会有地址无法对齐的尴尬情况。举个例子说,16位总线读地址0x0000时(忽略基地址),read_byte()读的是D0_7这一组的电平值,读地址0x0001时,read_byte(),读的是D8_15这一组的电平值,反之写操作也是一样。那么16位总线与sja1000相连时,如果只用DA0_7脚,必然导致虽偶地址访问正常,奇地址访问不到的情况。这个也好解决,我们用DA1_8引脚就可以了。整个连接起来如下图的样子。
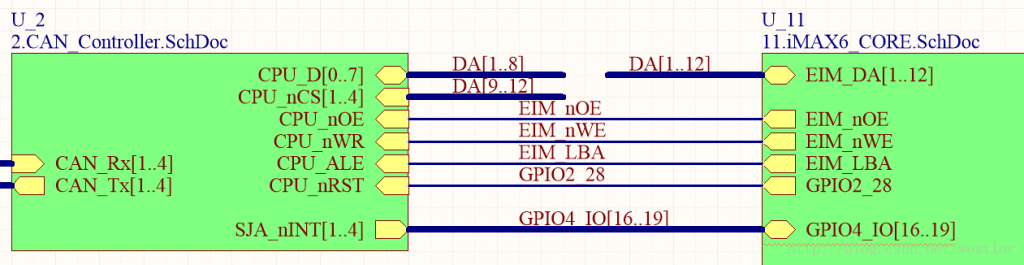
其中EIM_nOE、EIM_nWE和EIM_LBA与51单片机的WR、RD和ALE类似,DA1_8为地址/数据复用总线的0_7位,DA9_12则用来当4个CS信号线用(接了4片SJA1000芯片),EIM总线有CS0_3,不过被其它功能引脚复用占了,这里就只能这么干了。至于RST和INT线,随便找几个GPIO就行。
接下来简单分析下硬件时序,先看sja1000芯片的读时序。
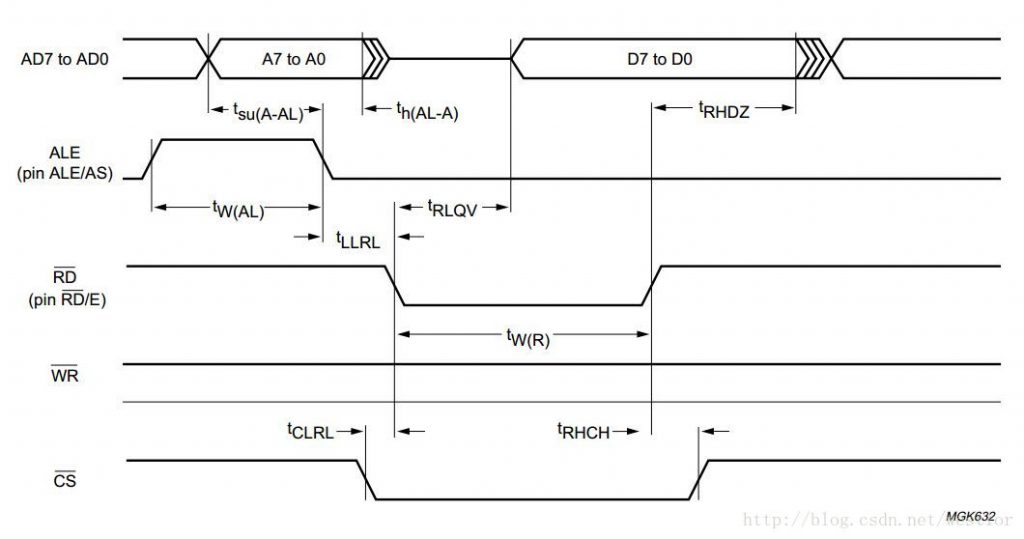
从图中可以看出,读操作周期中,主机端先给出要读的地址(AD0_7上产生),然后拉低ALE信号,提示sja1000设备进行地址锁存,拉低CS信号,使能sja1000设备,最后拉低RD信号,释放地址/数据总线。sja1000设备在t_RLQV时间内准备好数据,然后写在数据总线上。主机在t_W/R时间后,拉高RD信号,读取地址/总线上的数据,拉高CS线,完成一个读操作周期。整个读操作周期中WR信号为高。写操作周期与之类似,如下图所示。
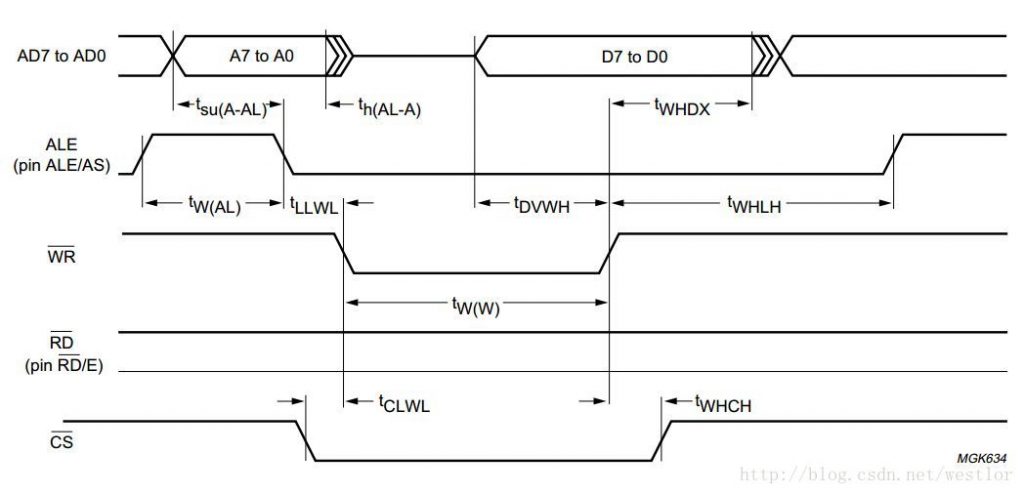
同样,主机端准备好地址信号,拉低ALE信号、CS信号,然后拉低WR信号,提示sja1000设备将进行写操作。之后主机端在地址/总线上写数据信号,等待t_DVWH后,拉高WR信号线,在t_WHDX时间后释放总线。sja100设备在拉高WR信号的时候进行接收数据。
这里使用的是3.14.28版本linux内核,由于支持设备树,为驱动程序的编写带来了很多便利。首先修改dts文件,使能WEIM总线,并配置需要用到的功能引脚、GPIO、中断引脚。
&weim {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_weim>;
status = "okay";
};
&iomuxc {
pinctrl_weim: weim1grp {
fsl,pins = <
MX6QDL_PAD_EIM_OE__EIM_OE_B 0x9091
MX6QDL_PAD_EIM_RW__EIM_RW 0x9091
MX6QDL_PAD_EIM_CS0__EIM_CS0_B 0x9091
MX6QDL_PAD_EIM_LBA__EIM_LBA_B 0x9091
/* SJA1000_RST */
MX6QDL_PAD_EIM_EB0__GPIO2_IO28 0x9091
/* SJA1000 INT */
MX6QDL_PAD_DI0_DISP_CLK__GPIO4_IO16 0x9091
MX6QDL_PAD_DI0_PIN15__GPIO4_IO17 0x9091
MX6QDL_PAD_DI0_PIN2__GPIO4_IO18 0x9091
MX6QDL_PAD_DI0_PIN3__GPIO4_IO19 0x9091
/* SJA1000 LED */
MX6QDL_PAD_DISP0_DAT5__GPIO4_IO26 0x80000000
MX6QDL_PAD_DISP0_DAT6__GPIO4_IO27 0x80000000
MX6QDL_PAD_DISP0_DAT7__GPIO4_IO28 0x80000000
MX6QDL_PAD_DISP0_DAT8__GPIO4_IO29 0x80000000
/* SJA1000_ADDA */
MX6QDL_PAD_EIM_DA0__EIM_AD00 0x9091
MX6QDL_PAD_EIM_DA1__EIM_AD01 0x9091
MX6QDL_PAD_EIM_DA2__EIM_AD02 0x9091
MX6QDL_PAD_EIM_DA3__EIM_AD03 0x9091
MX6QDL_PAD_EIM_DA4__EIM_AD04 0x9091
MX6QDL_PAD_EIM_DA5__EIM_AD05 0x9091
MX6QDL_PAD_EIM_DA6__EIM_AD06 0x9091
MX6QDL_PAD_EIM_DA7__EIM_AD07 0x9091
MX6QDL_PAD_EIM_DA8__EIM_AD08 0x9091
MX6QDL_PAD_EIM_DA9__EIM_AD09 0x9091
MX6QDL_PAD_EIM_DA10__EIM_AD10 0x9091
MX6QDL_PAD_EIM_DA11__EIM_AD11 0x9091
MX6QDL_PAD_EIM_DA12__EIM_AD12 0x9091
MX6QDL_PAD_EIM_DA13__EIM_AD13 0x9091
MX6QDL_PAD_EIM_DA14__EIM_AD14 0x9091
MX6QDL_PAD_EIM_DA15__EIM_AD15 0x9091
>;
};
};
};weim总线中配置的引脚有 EIM_DA0_15(只用到DA1_12)、EIM_OE、EIM_RW、EIM_LBA、EIM_CS0(cs线由高位地址线取代,这里无用),sja1000驱动中添加了四个中断引脚(对应4个sja1000芯片)、4个LED gpio(CAN通信指示灯用)、RST GPIO(产生硬复位信号,一般不用)。接下来看sja1000驱动需要添加的dts文件内容。
/ {
sja1000@08001C00 {
compatible = "weim,sja1000";
reg = <0x08001C00 0x1FF>;
nxp,external-clock-frequency = <16000000>;
nxp,tx-output-config = <0x16>;
nxp,no-comparator-bypass;
interrupt-parent = <&gpio4>;
interrupts = <16 0>;
int-gpios = <&gpio4 16 0>;
rst-gpios = <&gpio2 28 0>;
led-gpios = <&gpio4 26 0>;
};
sja1000@08001A00 {
compatible = "weim,sja1000";
reg = <0x08001A00 0x1FF>;
nxp,external-clock-frequency = <16000000>;
nxp,tx-output-config = <0x16>;
nxp,no-comparator-bypass;
interrupt-parent = <&gpio4>;
interrupts = <17 0>;
int-gpios = <&gpio4 17 0>;
led-gpios = <&gpio4 27 0>;
};
sja1000@08001600 {
compatible = "weim,sja1000";
reg = <0x08001600 0x1FF>;
nxp,external-clock-frequency = <16000000>;
nxp,tx-output-config = <0x16>;
nxp,no-comparator-bypass;
interrupt-parent = <&gpio4>;
interrupts = <18 0>;
int-gpios = <&gpio4 18 0>;
led-gpios = <&gpio4 28 0>;
};
sja1000@08000E00 {
compatible = "weim,sja1000";
reg = <0x08000E00 0x1FF>;
nxp,external-clock-frequency = <16000000>;
nxp,tx-output-config = <0x16>;
nxp,no-comparator-bypass;
interrupt-parent = <&gpio4>;
interrupts = <19 0>;
int-gpios = <&gpio4 19 0>;
led-gpios = <&gpio4 29 0>;
};
};四片sja1000芯片的基地址计算方式:weim总线的基地址为0x08000000,第一片sja1000芯片读写时DA1_8 对应地址/数据总线的D0_7,地址范围为 0x08000000~0x080001FF(忽略DA0的信号),由于DA9_12充当CS信号,读写第一片sja1000芯片时,需要保持DA9为0、DA10为1、DA11为1、DA12为1,从而第一片sja1000芯片的基地址为0x08001C00。同理,第二三四片sja1000芯片的基地址分别为 0x08001A00 、0x08001600、0x08000E00。
dts资源配置好后,需要在对应的驱动程序中正确引用。linux内核中已经有了sja1000_platform驱动(位于driver/net/can/sja1000目录下),直接在它的基础上修改下就行。
static struct of_device_id sp_of_table[] = {
{.compatible = "weim,sja1000"},
{},
};
MODULE_DEVICE_TABLE(of, sp_of_table);
static struct platform_driver sp_driver = {
.probe = sp_probe,
.remove = sp_remove,
.driver = {
.name = DRV_NAME,
.owner = THIS_MODULE,
.of_match_table = sp_of_table,
},
};2. 初始化weim总线
这里通过修改寄存器完成,程序在加载驱动程序时调用,主要配置weim时钟、中断、地址/数据总线端口、时序控制等,详见imx6数据手册。
static int __init sp_init(void)
{
mx6q_setup_weimcs();
return platform_driver_register(&sp_driver);
}
module_init(sp_init);
void mx6q_setup_weimcs(void)
{
unsigned int reg;
void __iomem *eim_reg = ioremap(WEIM_BASE_ADDR, 0x20);
void __iomem *ccm_reg = ioremap(CCM_BASE_ADDR, 0x80);
if(!eim_reg){
printk("error iomem eim_reg\n");
}
if(!ccm_reg){
printk("error iomem ccm_reg\n");
}
// divicer for aclk_eim_slow
reg = readl(ccm_reg + 0x1C);
reg &= ~(0x60000000);
reg |= 0x00380000;
writel(reg, ccm_reg + 0x1C);
/* CLKCTL_CCGR6: Set emi_slow_clock to be on in all modes */
reg = readl(ccm_reg + 0x80);
reg |= 0x00000C00;
writel(reg, ccm_reg + 0x80);
/* CS0GCR1:
* [22-20 CSREC: minimum EIM clock cycles width of CS, OE and WE signals]
* DSZ[16:18]:
001 16 bit port resides on DATA[15:0]
* EIM Operation Mode: MUM=1, SRD = SWR = 0.
* (Async write/Async page read, multiplexed)
*/
writel(0x07f13039, eim_reg);
writel(0x00001002, eim_reg + 0x00000004);
/* CS0RCR1:
* Bit 31 30 29 28--27 26 25 24--23 22 21 20--19 18 17 16
* 0 RWSC 0 RADVA RAL RADVN
* Bit 15 14 13 12--11 10 9--8 7 6 5 4--3 2 1 0
* 0 OEA 0 OEN 0 RCSA 0 RCSN
* CS0RCR2:
* APR = 0 (Async Page Read); [15]
* PAT = 7 (9 EIM clock sycles) [12:14]
* RBEA = 7 (Read BE Assertion) [4:6]
* RBE = 1 (Read BE enable) [3]
* RBEN = 7 (Read BE Negation) [0:2]
*/
writel(0x18683372, eim_reg + 0x00000008);
writel(0x00000068, eim_reg + 0x0000000C);
/*
* For EIM Write Configuration registers.
*
* CS0WCR1:
* Bit 31 30 29 28 27 26 25 24 23 22 21 20--19 18 17 16--15
* WAL WBED WWSC WADVA WADVN WBEA
* 1 1 01 1000 011 0--00 11--1
* Bit 14 13 12 11 10 9 8-- 7 6 5 4 3 2 1 0
* WBEN WEA WEN WCSA WCSN
* 111 111 1--11 100 110
* CS0WCR2:
* WBCDD = 0
*/
writel(0xd863ffe6, eim_reg + 0x00000010);
writel(0x00000000, eim_reg + 0x00000014);
printk("WEIM init end, CS0GCR1_is %x\n", readl(eim_reg));
iounmap(eim_reg);
iounmap(ccm_reg);
}3、probe函数修改
probe函数中主要针对添加了rst引脚和led引脚,其它未做改变。可以看到,probe函数中,申请了sja1000设备的总线资源,根据GPIO中断引脚号申请了终端,然后将platform设备注册到sja1000驱动中。
static int sp_probe(struct platform_device *pdev)
{
...
res_mem = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (!res_mem)
return -ENODEV;
if (!devm_request_mem_region(&pdev->dev, res_mem->start, resource_size(res_mem), DRV_NAME))
return -EBUSY;
addr = devm_ioremap_nocache(&pdev->dev, res_mem->start, resource_size(res_mem));
if (!addr)
return -ENOMEM;
if (of){
reset_pin = of_get_named_gpio(of, "rst-gpios", 0);
irq_pin = of_get_named_gpio(of, "int-gpios", 0);
led_pin = of_get_named_gpio(of, "led-gpios", 0);
irq = irq_of_parse_and_map(of, 0);
if(gpio_is_valid(reset_pin)) {
err = devm_gpio_request_one(&pdev->dev, reset_pin,
GPIOF_OUT_INIT_HIGH, "sja1000 reset");
if (err) {
dev_err(&pdev->dev,
"Failed to request GPIO %d as reset pin, error %d\n",
reset_pin, err);
}
}
if(gpio_is_valid(irq_pin)){
err = devm_gpio_request_one(&pdev->dev, irq_pin,
GPIOF_IN, "sja1000 int");
if (err) {
dev_err(&pdev->dev,
"Failed to request GPIO %d as irq pin, error %d\n",
irq_pin, err);
}
}
if(gpio_is_valid(led_pin)) {
err = devm_gpio_request_one(&pdev->dev, led_pin,
GPIOF_OUT_INIT_LOW, "sja1000 led");
if (err) {
dev_err(&pdev->dev,
"Failed to request GPIO %d as led pin, error %d\n",
irq_pin, err);
}
}
}else{
res_irq = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
}
...
dev = alloc_sja1000dev(0);
...
priv = netdev_priv(dev);
if (res_irq) {
irq = res_irq->start;
priv->irq_flags = res_irq->flags & IRQF_TRIGGER_MASK;
if (res_irq->flags & IORESOURCE_IRQ_SHAREABLE)
priv->irq_flags |= IRQF_SHARED;
} else {
priv->irq_flags |= IRQF_TRIGGER_LOW;
}
dev->irq = irq;
priv->reg_base = addr;
priv->irq_pin = irq_pin;
priv->reset_pin = reset_pin;
priv->led_pin = led_pin;
priv->led_status = 0;
priv->wdataOffset = res_mem->start - 0x08000000; /* add write data offset */
if (of)
sp_populate_of(priv, of);
else
sp_populate(priv, pdata, res_mem->flags);
platform_set_drvdata(pdev, dev);
SET_NETDEV_DEV(dev, &pdev->dev);
err = register_sja1000dev(dev);
...
}4. read/write 地址偏移
由于使用的是DA1_8引脚(DA9_12充当了CS信号),其读写地址肯定不能直接在基地址上了。修改sja100_platform中的write8和read8函数,完成读写的地址偏移。
static u8 sp_read_reg8(const struct sja1000_priv *priv, int reg)
{
u16 data;
data = ioread16(priv->reg_base + reg*2);
return data>>1;
}
static void sp_write_reg8(const struct sja1000_priv *priv, int reg, u8 val)
{
u16 data=val;
data = data*2;
iowrite16(data + priv->wdataOffset, priv->reg_base + reg*2);
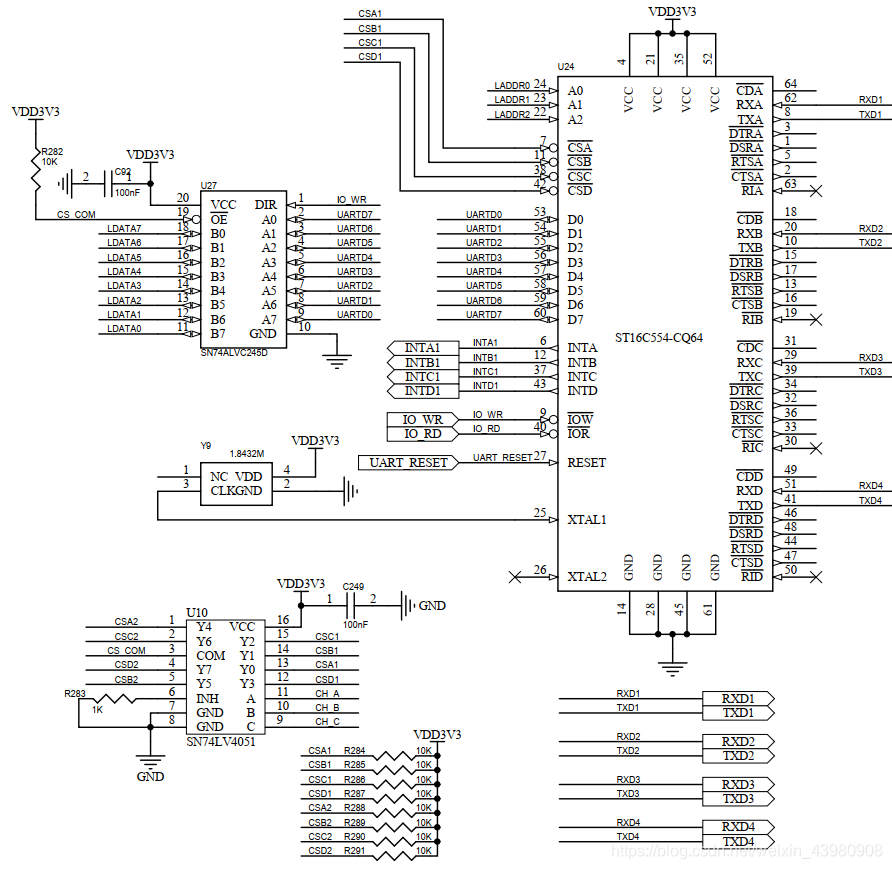
}最近做了一个项目使用的正点原子的imx6ull核心板平台,里面涉及到了有关于使用imx6ull的EIM接口进行外部串口扩展的部分,串口扩展芯片使用的是ST16C554这个芯片。这里针对这部分内容做一个记录和分享。
设备树部分
pinctrl_COM1_8: COM1_8 {
fsl,pins = <
MX6UL_PAD_LCD_DATA08__EIM_DATA00 0x10b1
MX6UL_PAD_LCD_DATA09__EIM_DATA01 0x10b1
MX6UL_PAD_LCD_DATA10__EIM_DATA02 0x10b1
MX6UL_PAD_LCD_DATA11__EIM_DATA03 0x10b1
MX6UL_PAD_LCD_DATA12__EIM_DATA04 0x10b1
MX6UL_PAD_LCD_DATA13__EIM_DATA05 0x10b1
MX6UL_PAD_LCD_DATA14__EIM_DATA06 0x10b1
MX6UL_PAD_LCD_DATA15__EIM_DATA07 0x10b1
MX6UL_PAD_CSI_PIXCLK__EIM_OE 0x10b1 /* IO_RD */
MX6UL_PAD_CSI_VSYNC__EIM_RW 0x10b1 /* IO_WR */
MX6UL_PAD_CSI_DATA00__EIM_AD00 0x10b1 /* A0 */
MX6UL_PAD_CSI_DATA01__EIM_AD01 0x10b1 /* A1 */
MX6UL_PAD_CSI_DATA02__EIM_AD02 0x10b1 /* A2 */
MX6UL_PAD_CSI_DATA03__EIM_AD03 0x10b1 /* A3 模拟开关选择 */
MX6UL_PAD_CSI_DATA04__EIM_AD04 0x10b1 /* A4 模拟开关选择 */
MX6UL_PAD_CSI_DATA05__EIM_AD05 0x10b1 /* A5 模拟开关选择 */
MX6UL_PAD_CSI_MCLK__EIM_CS0_B 0x10b1 /* CS0 8选1 */
MX6UL_PAD_LCD_DATA20__GPIO3_IO25 0x3000 /* INTA1 */
MX6UL_PAD_LCD_DATA19__GPIO3_IO24 0x3000 /* INTB1 */
MX6UL_PAD_LCD_DATA21__GPIO3_IO26 0x3000 /* INTC1 */
MX6UL_PAD_LCD_DATA18__GPIO3_IO23 0x3000 /* INTD1 */
MX6UL_PAD_LCD_DATA17__GPIO3_IO22 0x3000 /* INTA2 */
MX6UL_PAD_LCD_DATA16__GPIO3_IO21 0x3000 /* INTB2 */
MX6UL_PAD_LCD_DATA22__GPIO3_IO27 0x3000 /* INTC2 */
MX6UL_PAD_LCD_DATA23__GPIO3_IO28 0x3000 /* INTD2 */
MX6UL_PAD_GPIO1_IO05__GPIO1_IO05 0x10b1 /* UART_RESET */
>;
上面的是设备树的引脚属性设置部分。
&weim {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_COM1_8>;
#address-cells = <2>;
#size-cells = <1>;
fsl,weim-cs-gpr = <&gpr>;
ranges = <0 0 0x50000000 0x08000000>;
status = "okay";
st16c554@0,8 {
compatible = "st16c554";
reg = <0 0 0x08000000>;
fsl,weim-cs-timing = <0x00640081 0x00000001 0x1c022000
0x0000c000 0x1404a38e 0x00000000>;
};
};
上面的是设备树中关于eim接口的相关设置。这里主要说明一下fsl,weim-cs-timing属性,该属性就是设置eim通道的寄存器值的,imx6ull的eim接口根据cs计算一共4个通道,我这里通过ranges 设置只使用了通道0,fsl,weim-cs-timing的六个值就会设置为通道0的6个寄存器对应的值。设备树中的其他属性对应的意义可以参考linux的文档说明Documentation\devicetree\bindings\bus\imx-weim.txt,寄存器的具体含义参考imx6ull的参考文档即可。
开启8250串口驱动,使用的端口数量的话根据自己的使用你情况进行配置即可,我这里用到8个所以设置8个。还有我发现一个奇怪的现象就是设置0个端口register at runtime时内核好像就会启动失败,控制台什么都不输出了,不知道是什么情况,总之设置时下面那个数字不要设置为0。
#include <linux/module.h>
#include <linux/init.h>
#include <linux/serial_8250.h>
#include <linux/platform_device.h>
#include <linux/kernel.h>
#include <linux/of_irq.h>
#include <linux/irq.h>
#include <linux/of_gpio.h>
#include <linux/delay.h>
#include <linux/gpio.h>
#include <asm/irq.h>
#include <asm/mach/map.h>
#include <asm/io.h>
#define ST16C554_REG_SIZE 0x08
#define IMX_GPIO_NR(bank, nr) (((bank) - 1) * 32 + (nr))
#define CS0_BASE 0x50000000
#define CSA1_BASE CS0_BASE
#define CSB1_BASE (CS0_BASE | 1 << 3) //A3 A4 A5作为8选1模拟开关选择线
#define CSC1_BASE (CS0_BASE | 2 << 3)
#define CSD1_BASE (CS0_BASE | 3 << 3)
#define CSA2_BASE (CS0_BASE | 4 << 3)
#define CSB2_BASE (CS0_BASE | 5 << 3)
#define CSC2_BASE (CS0_BASE | 6 << 3)
#define CSD2_BASE (CS0_BASE | 7 << 3)
/* 寄存器地址偏移定义 */
#define PORT_REG_RHR 0
#define PORT_REG_THR 0
#define PORT_REG_IER 1
#define PORT_REG_ISR 2
#define PORT_REG_FCR 2
#define PORT_REG_LCR 3
#define PORT_REG_MCR 4
#define PORT_REG_LSR 5
#define PORT_REG_MSR 6
#define PORT_REG_SPR 7
#define PORT_REG_DLL 0 //波特率设置寄存器
#define PORT_REG_DLM 1
#define PORT(_base,_irq) \
{ \
.type = PORT_16550A, \
.iobase = _base, \
.mapbase = _base, \
.irq = _irq, \
.irqflags = IRQF_TRIGGER_RISING, \
.uartclk = 1843200, \
.iotype = UPIO_MEM, \
.regshift = 0, \
.flags = UPF_BOOT_AUTOCONF | UPF_IOREMAP, \
}
#define ST16C554_INTA1 gpio_to_irq(IMX_GPIO_NR(3,25))
#define ST16C554_INTB1 gpio_to_irq(IMX_GPIO_NR(3,24))
#define ST16C554_INTC1 gpio_to_irq(IMX_GPIO_NR(3,26))
#define ST16C554_INTD1 gpio_to_irq(IMX_GPIO_NR(3,23))
#define ST16C554_INTA2 gpio_to_irq(IMX_GPIO_NR(3,22))
#define ST16C554_INTB2 gpio_to_irq(IMX_GPIO_NR(3,21))
#define ST16C554_INTC2 gpio_to_irq(IMX_GPIO_NR(3,27))
#define ST16C554_INTD2 gpio_to_irq(IMX_GPIO_NR(3,28))
static struct plat_serial8250_port exar_data[] = {
PORT(CSA1_BASE, 0),
PORT(CSB1_BASE, 0),
PORT(CSC1_BASE, 0),
PORT(CSD1_BASE, 0),
PORT(CSA2_BASE, 0),
PORT(CSB2_BASE, 0),
PORT(CSC2_BASE, 0),
PORT(CSD2_BASE, 0),
{ },
};
static struct platform_device exar_device = {
.name = "serial8250",
// .id = PLAT8250_DEV_EXAR_ST16C554,
.dev = {
.platform_data = exar_data,
},
};
int fsl8250_handle_irq(struct uart_port *port)
{
unsigned char lsr, orig_lsr;
unsigned long flags;
unsigned int iir;
struct uart_8250_port *up = up_to_u8250p(port);
// printk("irq = %d ", port->irq);
spin_lock_irqsave(&up->port.lock, flags);
iir = port->serial_in(port, PORT_REG_ISR);
if (iir & 0x01) {
spin_unlock_irqrestore(&up->port.lock, flags);
return 0;
}
/* This is the WAR; if last event was BRK, then read and return */
if (unlikely(up->lsr_saved_flags & 0x10)) {
up->lsr_saved_flags &= ~0x10;
port->serial_in(port, PORT_REG_RHR);
spin_unlock_irqrestore(&up->port.lock, flags);
return 1;
}
lsr = orig_lsr = up->port.serial_in(&up->port, PORT_REG_LSR);
if (lsr & 0x01)
lsr = serial8250_rx_chars(up, lsr);
serial8250_modem_status(up);
if (lsr & 0x20)
serial8250_tx_chars(up);
up->lsr_saved_flags = orig_lsr;
spin_unlock_irqrestore(&up->port.lock, flags);
return 1;
}
static int __init my_serial_init(void)
{
int ret;
int rst_io;
exar_data[0].irq = ST16C554_INTA1;
exar_data[1].irq = ST16C554_INTB1;
exar_data[2].irq = ST16C554_INTC1;
exar_data[3].irq = ST16C554_INTD1;
exar_data[4].irq = ST16C554_INTA2;
exar_data[5].irq = ST16C554_INTB2;
exar_data[6].irq = ST16C554_INTC2;
exar_data[7].irq = ST16C554_INTD2;
exar_data[0].handle_irq = fsl8250_handle_irq;
exar_data[1].handle_irq = fsl8250_handle_irq;
exar_data[2].handle_irq = fsl8250_handle_irq;
exar_data[3].handle_irq = fsl8250_handle_irq;
exar_data[4].handle_irq = fsl8250_handle_irq;
exar_data[5].handle_irq = fsl8250_handle_irq;
exar_data[6].handle_irq = fsl8250_handle_irq;
exar_data[7].handle_irq = fsl8250_handle_irq;
rst_io = IMX_GPIO_NR(1,5); //获得io编号
ret = gpio_direction_output(rst_io, 0); //复位
ret = gpio_direction_output(rst_io, 1);
if (ret < 0) {
printk("%s rst_io ouput error\n", __func__);
}
udelay(10); //延时10us
gpio_set_value(rst_io, 0);
udelay(1000); //延时1000us
return platform_device_register(&exar_device);
}
static void __exit my_serial_exit(void)
{
printk("unregister st16c554_driver\n");
platform_device_unregister(&exar_device);
}
module_init(my_serial_init);
module_exit(my_serial_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ljf");
PORT里面的参数我捡几个主要的进行说明一下,mapbase和iobase都是实际的物理地址,这个和你的EIM总线配置以及硬件连接有关。irq就是中断号,uartclk就是外接的时钟频率我接的是1.8432M的时钟就设置为1843200,串口的波特率最大就是clk/16,iotype设置为UPIO_MEM表示8位的内存地址,regshift表示地址偏移由于我是A0对应的ST16C554的A0所以设置为0表示没有偏移,UPF_IOREMAP表示地址需要映射到虚拟地址进行访问。
然后在init函数中申请中断号,设置handle_irq,进行芯片复位,最后将其注册成platform设备。然后就会和8250驱动匹配上进行8250驱动的一套流程,这里就不分析了。handle_irq函数可以参考8250_fsl.c和8250_core.c文件,里面都有相应的示例。
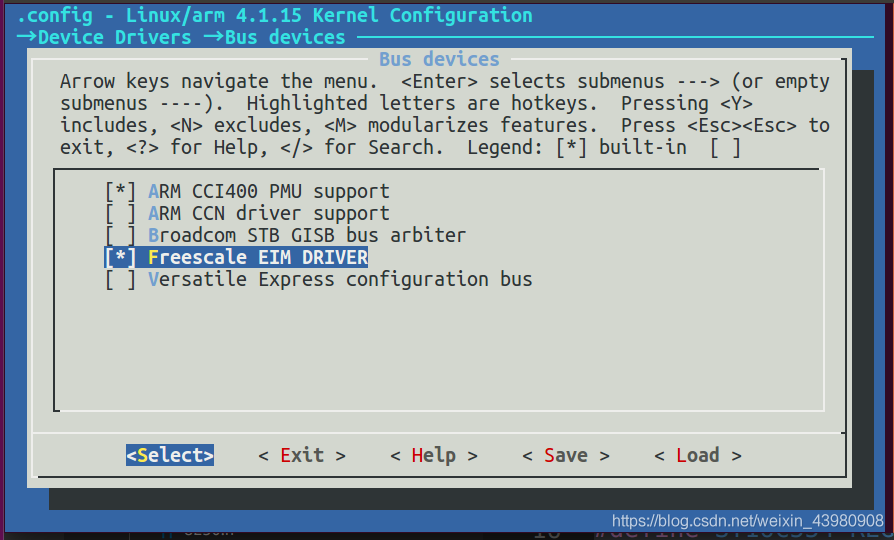
虽然驱动写完了但是还是不能直接使用,使用之前还需要开启EIM的时钟,虽然设备树里面设置了status的属性为okay但是eim的时钟却没有被开启,而且我试了直接在上面驱动中的init函数里设置CCM_CCGR6寄存器的bit10-11位,但是没用,只能在内核初始化完成之后再开启对应的时钟。于是我就又写了一个开启时钟的驱动。
static int __init st16c554_cmd_init(void)
{
void __iomem *ccm_ccgr6 = ioremap(CCM_BASE_ADDR + 0x80, 4);
unsigned int reg;
/* CLKCTL_CCGR6: Set emi_slow_clock to be on in all modes */
reg = readl(ccm_ccgr6);
reg |= 0x00000C00;
writel(reg, ccm_ccgr6);
reg = readl(ccm_ccgr6);
iounmap(ccm_ccgr6);
return 0;
}
static void __exit st16c554_cmd_exit(void)
{
}
module_init(st16c554_cmd_init);
module_exit(st16c554_cmd_exit);
MODULE_LICENSE("GPL");
驱动里面直接就是映射寄存器地址然后设置值,其他的什么都不做。这个驱动会在根文件系统加载之后被调用自动开启eim总线的时钟。

将驱动编译进内核里面,用新的内核进行启动如果驱动加载成功之后内核启动就会打印出相应的信息来,如上图所示。查看/dev目录可以看到已经有ttyS0-7这几个设备节点了。